Mechanical Grab
EC520 Standard driver
Create the attachment in the EC520 Tech UI using the normal bucket measure-up and calibration.
EC520 Measure-up
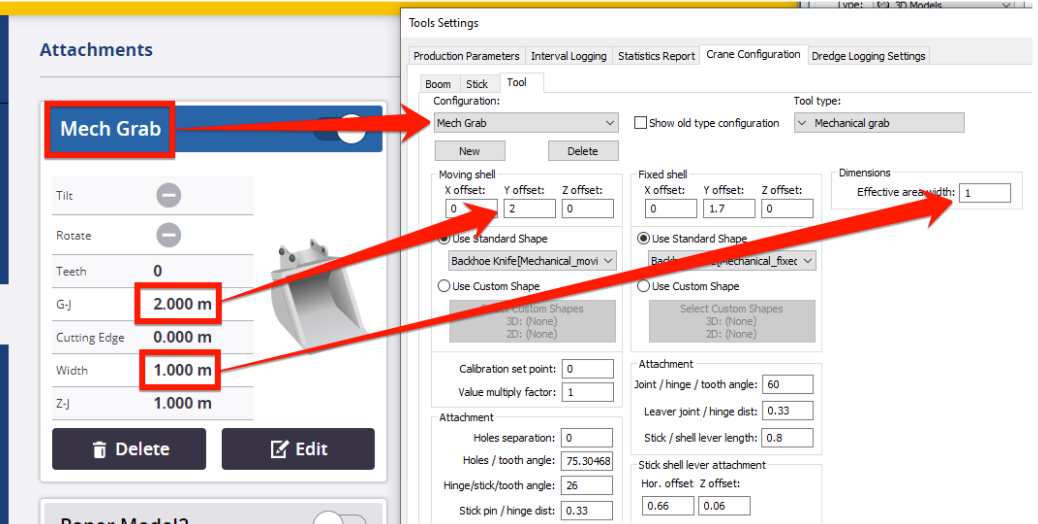
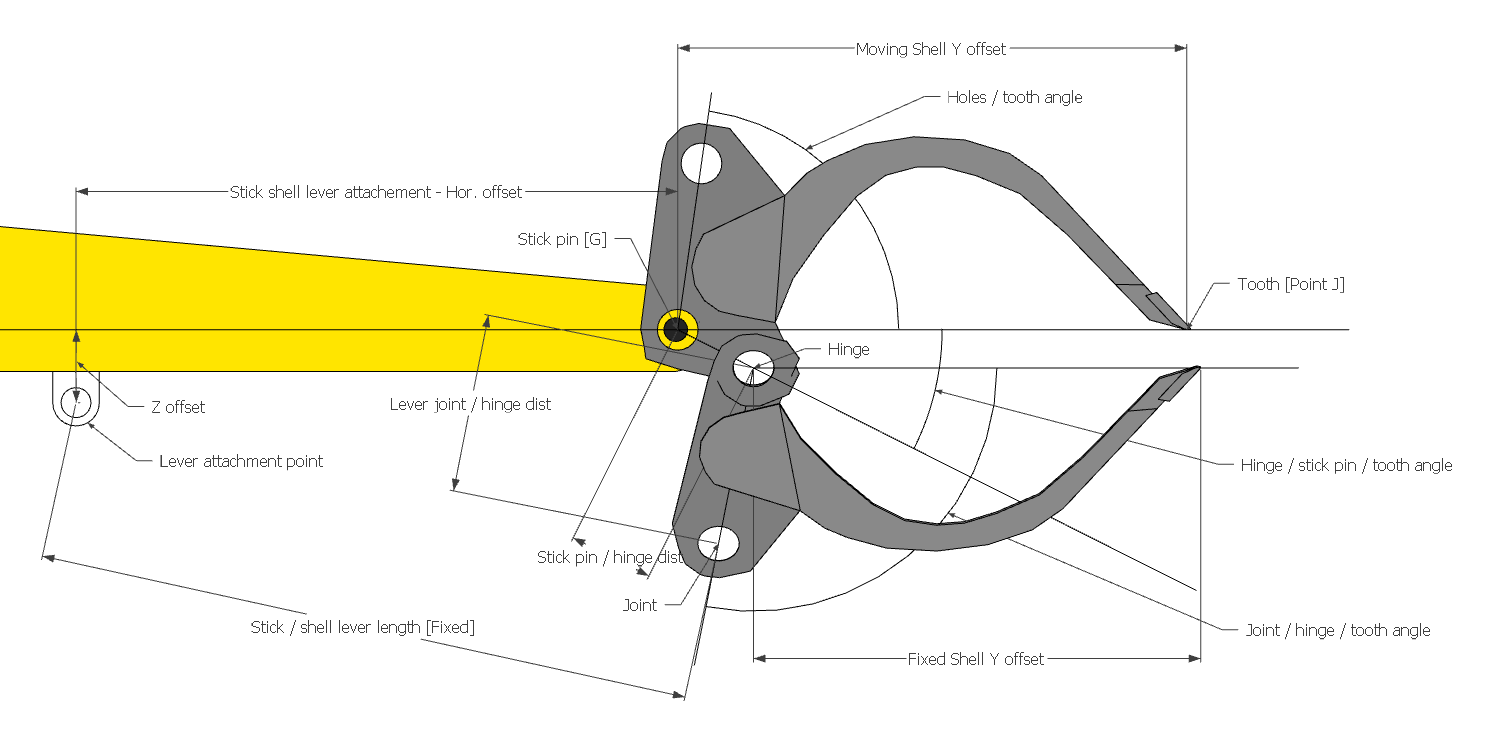
- Point J is the tip if the ‘Moving Shell’
- G-J is used by the EC520 driver to populate the ‘Moving Shell’ Y Offset
- Width is used by the EC520 driver to populate the Effective Width
NOTE: These values can be edited in TMC but will be overwritten by the EC520 driver so should only be edited in the EC520 Tech UI.
TMC Measure-up parameters
#TMC#hex#grab#measure-up#mechanical_grab#mechanical