Thanks for your answer, Brandon, but as far as I know, limit boxes apply only to visualisation, and this is not what I need. What I wish is to exclude some parts of a scan from the cloud to cloud algoritm. Very often there are parts in a scan falling on moving elements, like cars, trucks etc that may cause bias in the alignment. Of course if they are only in one scan, they will not cause major problems, but what if a truck has just moved 4 cm from scan 1 to scan 2?
Another very common case is when there are parts of a scan that are behind a glass or a mirror. They will come out in a wrong location due to refraction and or are reflections. You dont watn them to contaminate the scan alignment because they are not in the right position. All I want is to totally clean them or at least tag them to be ignored during alignment.
Cyclone, which is possibly the most important competitor provides the ability to delete points excluding them from visualisation and/or from cloud to cloud algos.
Original Message:
Sent: 09-16-2024 07:41
From: Brandon Elia
Subject: Re: Registration on regions instead of complete clouds
When registering the scans most software's I have used must use all of the points within the scan station because you are realigning all the data that is associated with that particular scan station. You can't move the orientation of a scan station without moving the orientation of the points associated with it. If you do not want to see a certain area of the scan during the registration process, I suggest using the "limit box" tool.
------------------------------
Brandon Elia
------------------------------
Original Message:
Sent: 09-13-2024 00:29
From: José Rubio
Subject: Re: Registration on regions instead of complete clouds
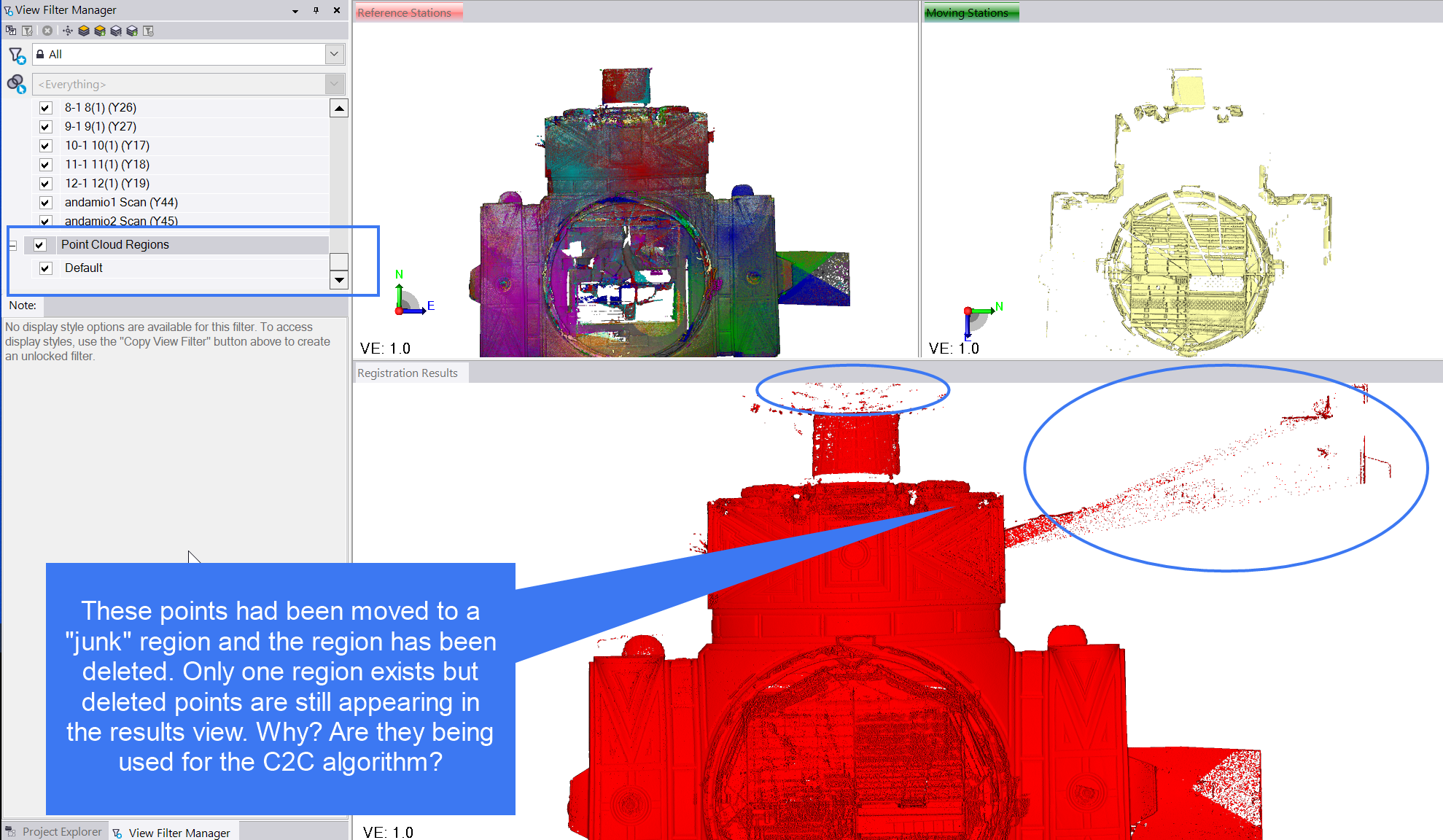
Sounds like the way to do, BUT the points that I move to a "junk" region, even when I completely remove the region from the workspace, remain existing and visible in the cloud to cloud register interface as if they where still used for the cloud to cloud matching algorithm. Why can't we tell TBC to ignore a region for alignment as is common in other software tools.
------------------------------
José Rubio
Original Message:
Sent: 09-10-2024 09:42
From: Robert Hoy
Subject: Re: Registration on regions instead of complete clouds
Keep out/keep in and add to region. I think creating your own region for it is safer though in case you want to use the people you once ignored.
------------------------------
Robert Hoy
Original Message:
Sent: 09-08-2024 12:53
From: José Rubio
Subject: Re: Registration on regions instead of complete clouds
I can imagine many cases where it would be desirable to tag some region of a scan to be ignored for alignment. For example while scanning on a harbor deck where a huge ship is docked. The hull in my case dominates the scene fo each scan but clearly provides unwanted constraint to the alignment. Most programs I've worked with, provide a way to either delete unwanted points or to tag as ignored before the cloud to cloud registration. How can I do that in TBC?
------------------------------
José Rubio
Original Message:
Sent: 06-29-2020 17:11
From: Rui Wu
Subject: Re: Registration on regions instead of complete clouds
Hi Nico, since the condition has changed from your initial scan to the current scan, it could be challenging for TBC to see the "common" plane. You can assist TBC by manually picking point pairs from the true common planes, i.e., the partial wall covered in insulation in both scans. The point pairs don't need to be at corners or on edges, they just need to be roughly at the same location in the plane.
Below is a typical scenario. Usually we would think the pier wall would be a good choice. But they are not the same actually. One is scanned from the left side, one is from the right side. In your case, it would be one with insulation and one without. So I would pick a point from a common plane, even though it's smaller than the ideal wall.
