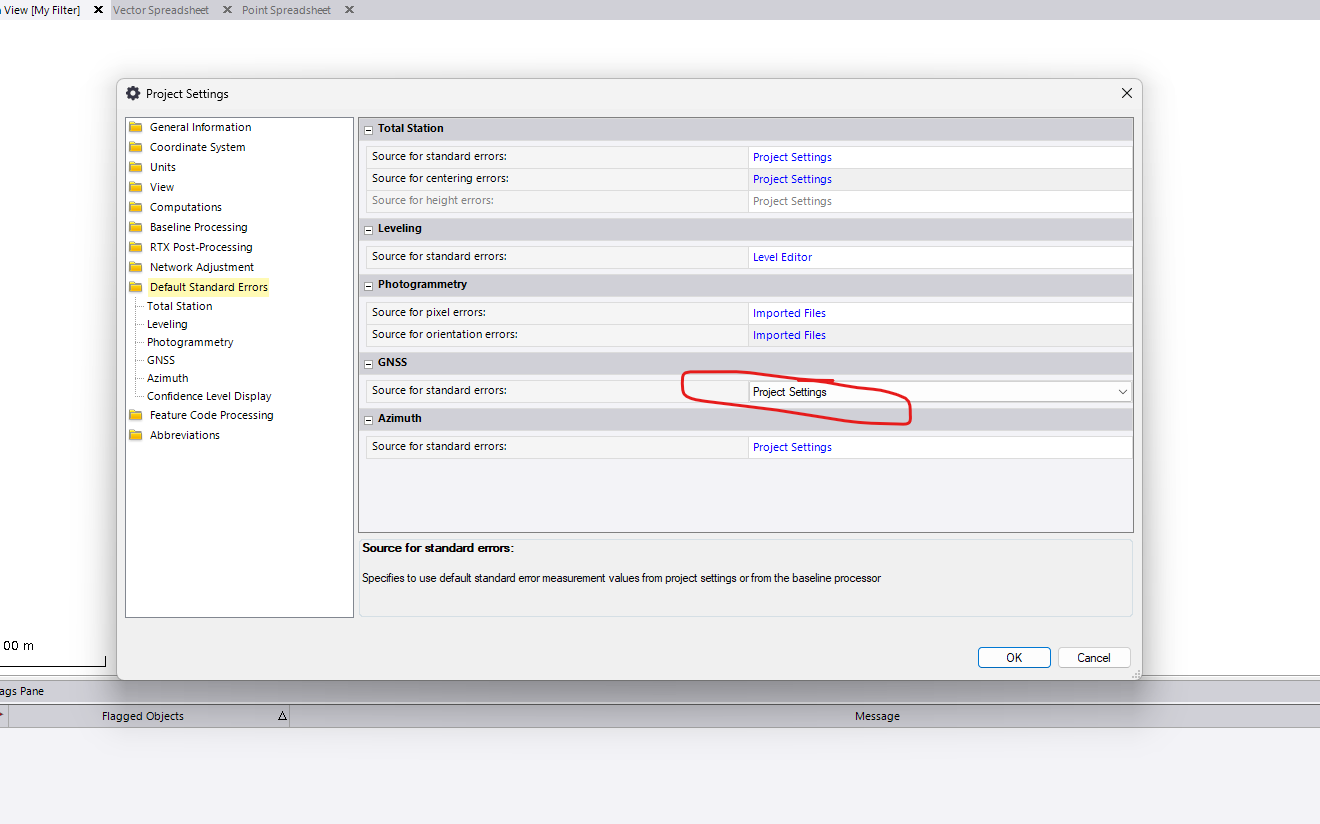
thanks robert, but not exactly what we are asking about. for me, i am using network adjustment. and like sean clearly lays out, you have the option for two types of standard errors for gnss, project settings or baseline processor. the project settings make sense, it will then pull centering/standard errors from the gnss inputs you enter in the tbc setting. but the baseline processor option is confusing. i don't know what info it is pulling from the baseline processor(if any). there are no centering options in the baseline processor. i have a feeling that this terminology is confusing.
here is one post i found from Ricahard Hassler:
Q: How does network adjustment handle static GNSS, VRS, and RTK data?
A: Usually you would want to use the Baseline Processor’s error estimates for GNSS data. Post Processed vectors get their error estimates from the TBC processing engine. RTK and VRS vectors get theirs from the engine in the receiver. Different algorithms are used in the different engines and different error estimates are produced. We recognize that real-time kinematic processing frequently has less data to use to estimate vector uncertainties, so we provide a separate scalar in the Weighting Strategies for kinematic vectors so that you can get the relative weighting correct in the minimally constrained adjustment.
AI answer:
When the GNSS source is set to Baseline Processor in the Default Standard Errors settings,  Trimble Business Center (TBC) bypasses any manually entered user-defined project errors for your post-processed vectors
Trimble Business Center (TBC) bypasses any manually entered user-defined project errors for your post-processed vectors. Instead, it uses the unique mathematical uncertainties computed directly by TBC's internal processing engine during baseline calculations.
[1, 2, 3]
Understanding how this mode operates relies on three key mechanisms:
1. Source of the Error Estimates
- Post-Processed (Static) Baselines: The standard errors (vector uncertainties) are extracted directly from the TBC baseline processing engine. They are unique to every single session and vary based on satellite geometry (GDOP), baseline length, occupation time, and signal noise. [1, 2, 3]
- RTK and VRS Vectors: If you have real-time kinematic data, the baseline processor mode uses the error estimates generated at the moment of capture by the RTK engine inside the field receiver. [1]
seems like that answer from richard makes me think that we should not be using the baseline processor option.